Content tagged localization
Tags
Months
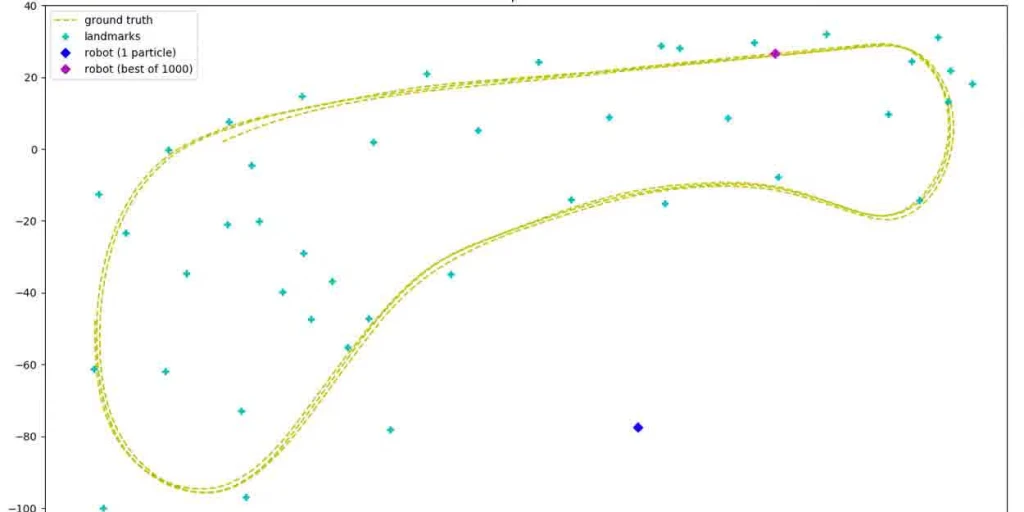
Playing with particle filters. They are a cool way to estimate a robot's position based on noisy signals and using randomness.
Playing with particle filters. They are a cool way to estimate a robot's position based on noisy signals and using randomness.