Content from 2017-05
Tags
Months
I need to run my neural network models on this board, so I need TensorFlow to run on it. I had expected a smooth ride, but it turned out to be quite an adventure and not one of a pleasant kind. Here's a how-to, so you don't have to waste time figuring it out yourself.
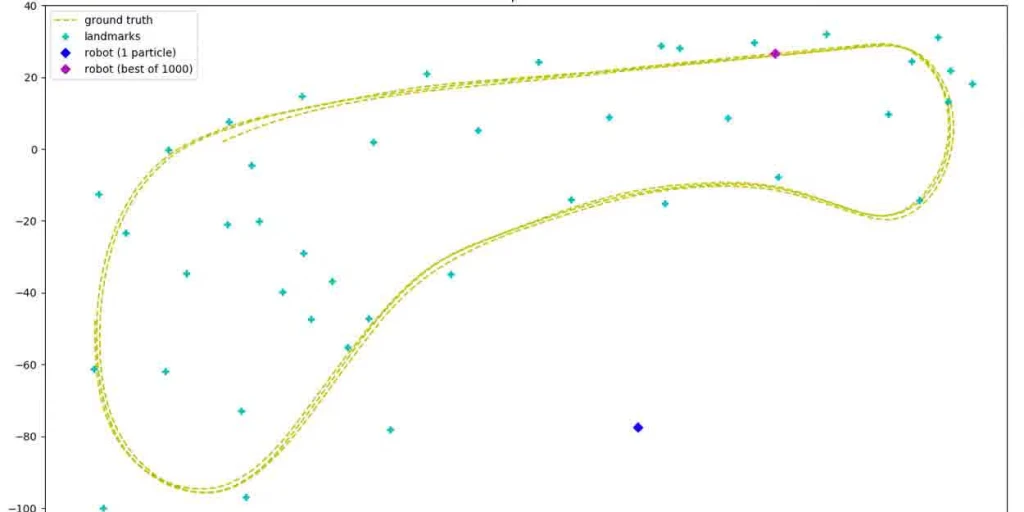
Playing with particle filters. They are a cool way to estimate a robot's position based on noisy signals and using randomness.