Content from 2018-03
Tags
Months
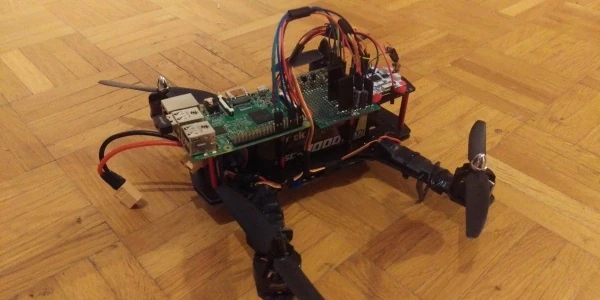
Ever since I can remember, I have wanted to build a quadcopter. Sure, you can buy one that will be way better than whatever you can make yourself, but where's the fun in that? The proper way to do it is to order a bunch of stuff that seems reasonable, put it together, make it (barely) fly, and iterate until the point where a swarm of them can play ping-pong.