Content tagged debian
Tags
Months

There are many pretty great ARM boards out there, but the stock firmware for most of them is ridden with binary blobs and is generally an abandonware. Fortunately, it's usually not that hard to make Debian work on most of them, including all the necessary multimedia peripherals.
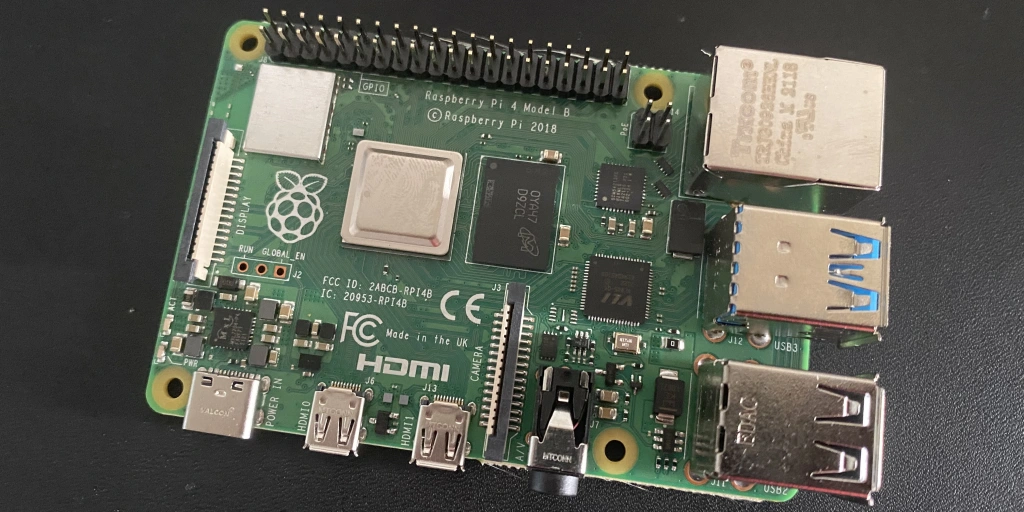
It's been quite a long while since the 64-bit CPUs took over the world. Most of the ecosystem moved on, but some of it didn't. The official OS for the RaspberryPi is one of the laggards, and it has started to be a problem. This post describes how to install the arm64 flavor of Debian on the device.
Building a usable Scala workflow with Emacs and Ant.
Making the UEFI installation of the UP Board boot Debian and making Debian drive the multimedia peripherals.
I like my computers to run Debian. Deploying it on strange devices is loads of fun. Here's how to bootstrap it on Cubox-i4Pro.