Content from 2016-01
Tags
Months
This is the first in a series of posts describing a threading library I built on top of Linux syscalls without Glibc. This post describes how to call syscalls, manage heap memory with custom-built malloc, and use the clone syscall to create a thread.
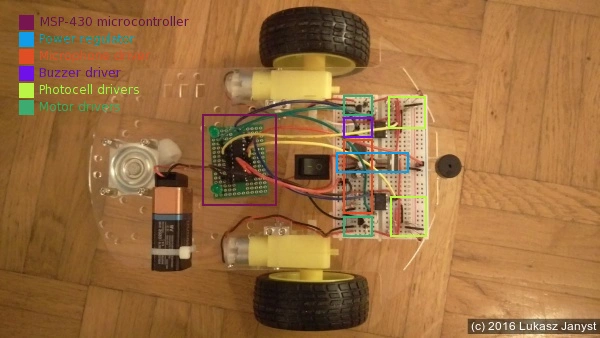
I wanted to learn basic electronics, but it's dead boring to do it on paper, so I decided to build a robot. It can follow the light and reacts to sound.