Content from 2017-08
Tags
Months
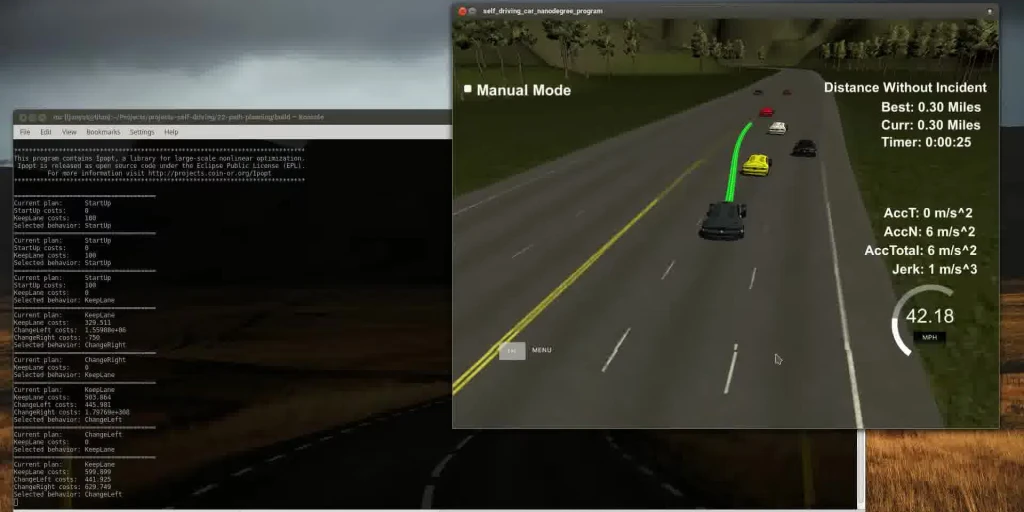
This post describes another one of the Udacity Self-driving Car Nanodegree projects. The goal is to plan a path or a car through highway traffic. You have to obey the rules, pay attention not to collide with anyone, and minimize jerk. I used a non-linear optimizer (Ipopt) and massaged the code I wrote for model-predictive control. Things worked out quite nicely.