Lukasz Janyst's web site
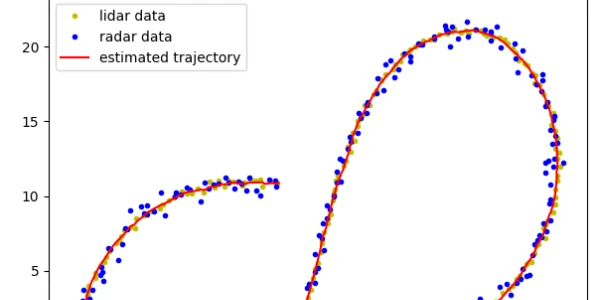
Estimating a trajectory of an object using Kalman filters based on radar and lidar data.